Servo valves come in two main architectures: two-stage and direct-drive. Most of what comes through the bench is one or the other, and the bench work overlaps but is not identical.
Two-stage is the older and more common pattern. A pilot stage on top (torque motor or jet pipe) does the fine work. A small coil pulls a flapper or rotates a jet against very tight tolerances, and the output of the pilot is a small pressure differential that pushes the main spool below it. As the spool slides, it opens and closes the four ports of the valve, sending pressurized oil to the cylinder and bringing return oil the other way. A feedback wire runs from the spool back into the pilot stage, mechanically tying the two together. The wire bends as the spool moves, biases the pilot, and tells it to back off. The whole assembly is balanced so the spool stops moving once input current and spool position match. That is the closed loop, built into the metal itself. Moog 760, Atchley 211, Pegasus 10/120 series, and Vickers SM4 all follow this pattern.
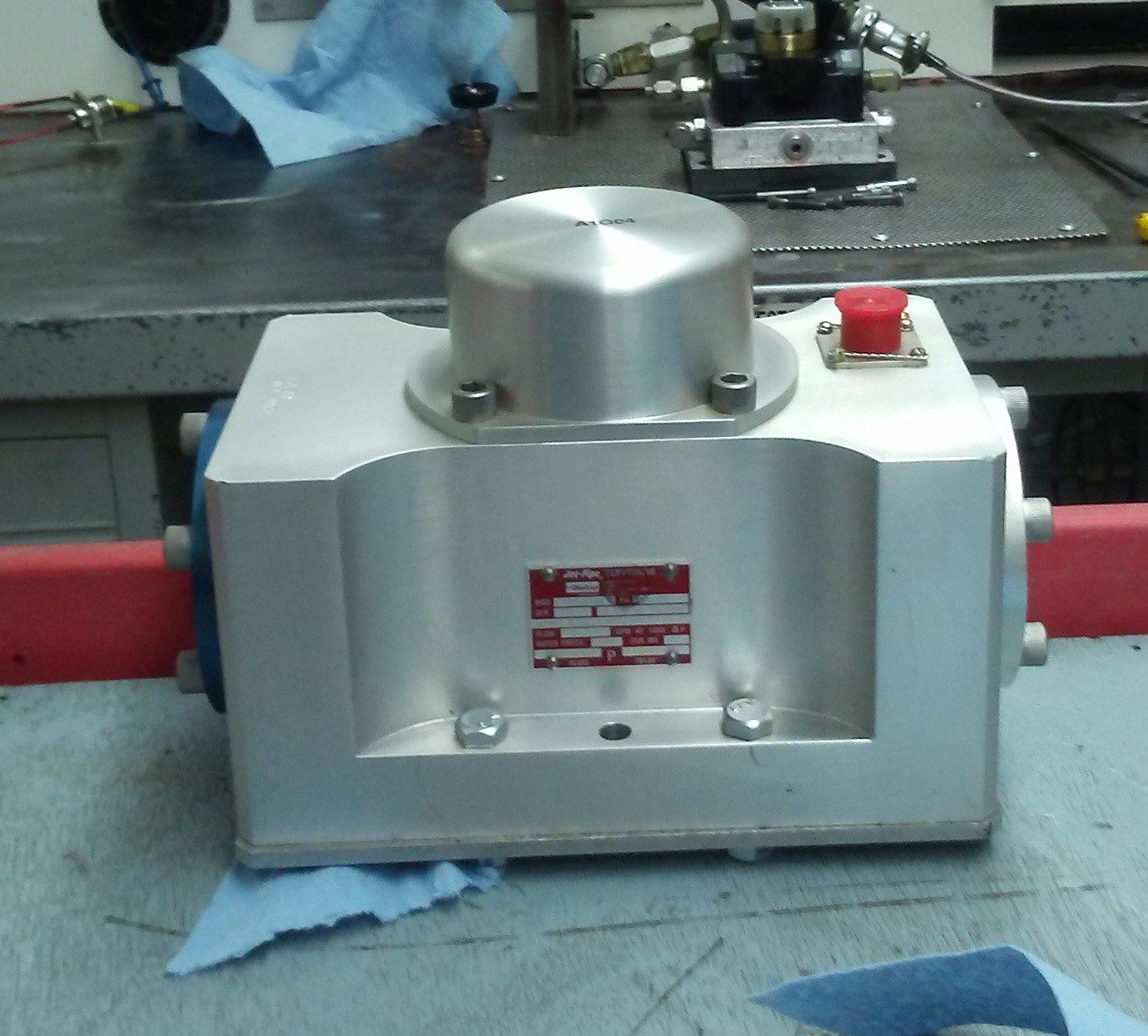
Direct-drive skips the pilot stage entirely. A larger torque motor or rotary actuator moves the spool directly, and an electronic position sensor (LVDT or rotary feedback) closes the loop electrically rather than mechanically. The unit at the top of this page is the most common direct-drive design we see: an HR Textron R-DDV. Direct-drive valves tend to handle contamination better than jet-pipe valves because the small pilot path is not a failure, and they usually need integrated electronics or an external driver card to run. HR Textron, Woodward, and some Moog G-series are the most common direct-drive families.
Bench work overlaps. A burned coil is a burned coil. A worn spool is a worn spool. The differences show up in the pilot stage on two-stage valves (which does not exist on direct-drive) and in the feedback channel on direct-drive valves (which is electronic rather than mechanical). The article below applies to both unless we call out a specific architecture.